Engineering the Future of Robotics
I have been a passionate engineer and computer scientist since my early high school years. My journey led me through a Masters program at Northwestern University, into a career designing autonomous boats at Ocean Power Technologies, and now to Applied Intuition where I work on defense robotics platforms.
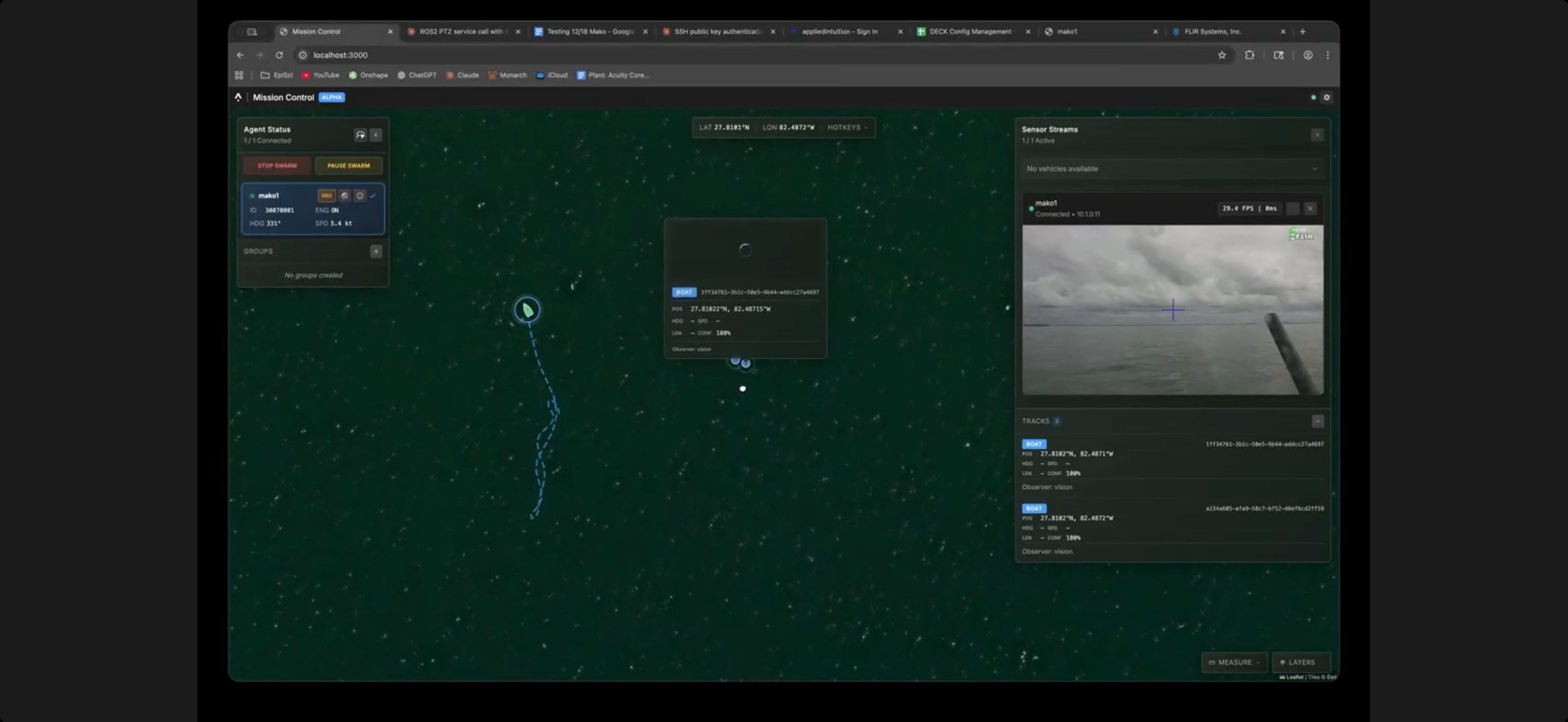
My expertise spans mechanical engineering, software development, and robotics, with a focus on creating distributed systems, perception pipelines, and intelligent autonomous systems for challenging real-world environments.
5+
Years Experience
20+
Projects Completed
MS
Robotics Degree
CO
Based in Boulder